



















新世代4WDシステム i-ACTIV AWD
先進技術で悪路でもシティユースでもより安全に。
i-ACTIV AWD(アイ・アクティブ・エーダブルディ)
降りしきる雨や雪、そして悪路。
いかなる路面に遭遇しても、思いのままの走りを実現するために。
走る歓びを追求するマツダの想いが、新世代4WDシステム、i-ACTIV AWDを誕生させました。
季節や道を問わない力強い走破力としなやかな操縦性が、いつでも快適で安心な走りをもたらします。
*動画内に用いている車両は一部旧型車となります。
i-ACTIV AWDとは
電子制御で駆動力を積極的にコントロールし、
走破性能と燃費性能を高次元で両立。
雨の高速道路や雪の坂道などのシーンを問わず、安心で快適、そして燃費性能にも貢献するi-ACTIV AWD。
スカイアクティブ テクノロジーと同様のアプローチを投入し、システムハードウェアとソフトウェアを全面的に見直すことで、走破性能と燃費効率をフルオートで高次元に両立するというブレークスルーを実現しました。
前後輪のトルク配分を自動制御。
ドライバーが気づかないレベルのごくわずかなタイヤの動きや路面状況などをリアルタイムにモニターし、前後輪のエンジントルク配分を2WD(FF)相当から直結4WD状態まで積極的にコントロール。優れた走破力と操縦安定性をもたらし、悪路でも効率のよい走りを実現します。
i-ACTIV AWDのしくみ
1. 多くのセンサーがドライバーの意図と走行状況を正確に検知
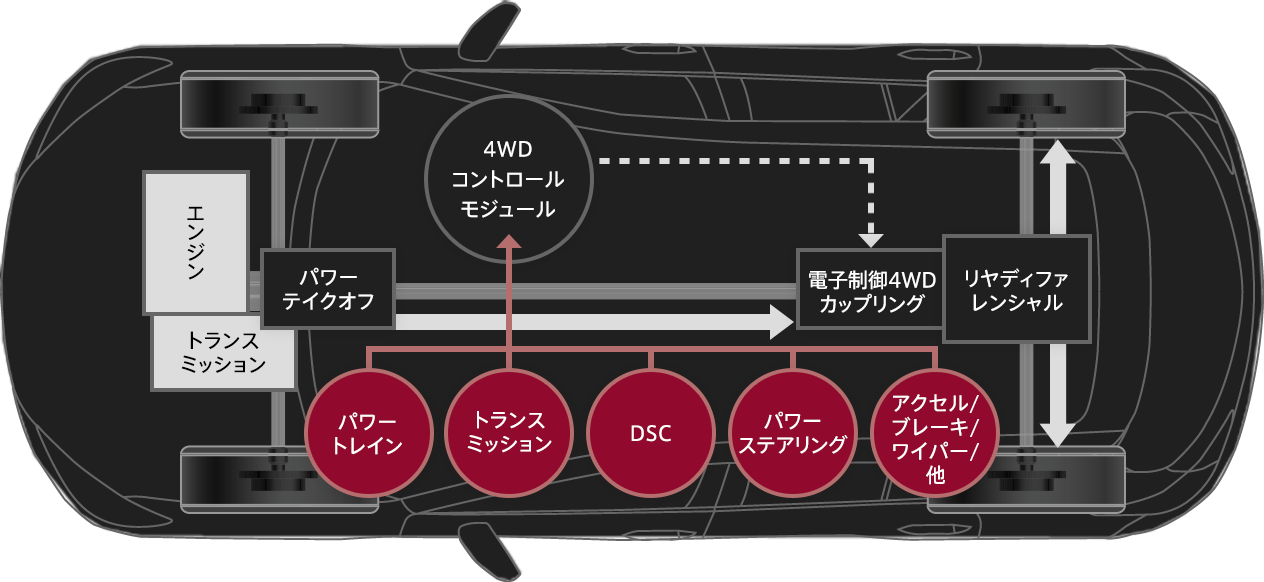
ドライバーの意図
アクセルペダル位置(発進、加速意図)
ステアリング角度(旋回意図)
ブレーキ液圧(制動意図)
路面状況
前後ワイパー(降雨、降雪)
外気温度(路面付近の温度)
ステアリングトルク・パワステモーター電流(ステアリング操作時の路面摩擦反力)
前後加速度(登坂路面勾配)
走行状況
4輪車速度(4車輪のスリップ量やその予兆)
エンジン駆動力(前輪駆動力)
4WDカップリング指令トルク(後輪駆動力)など
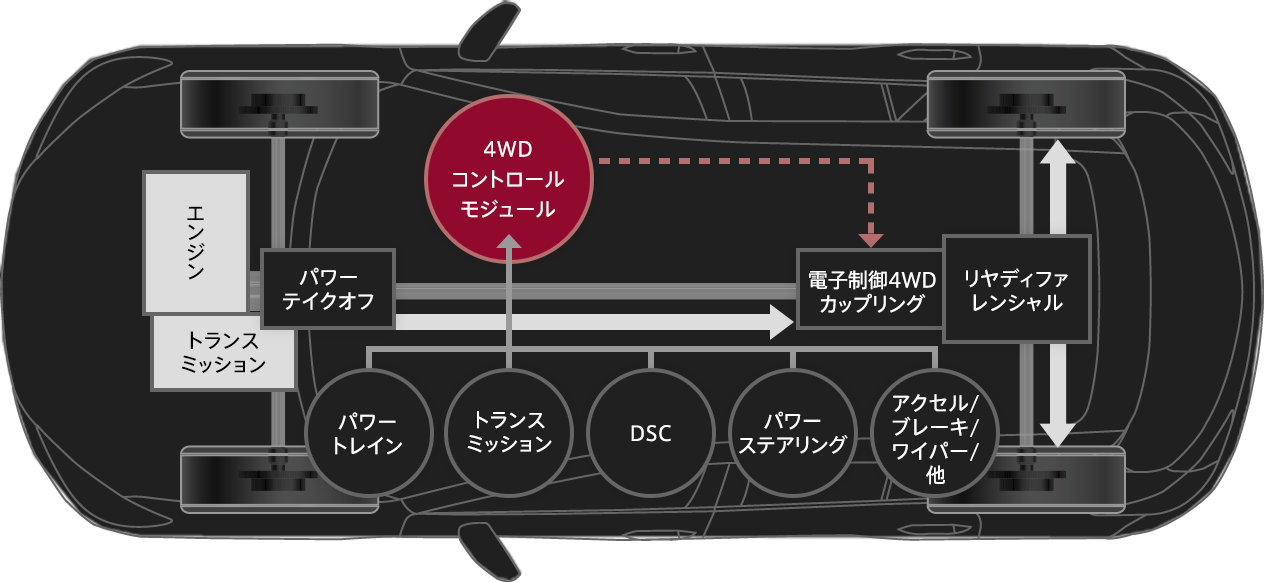
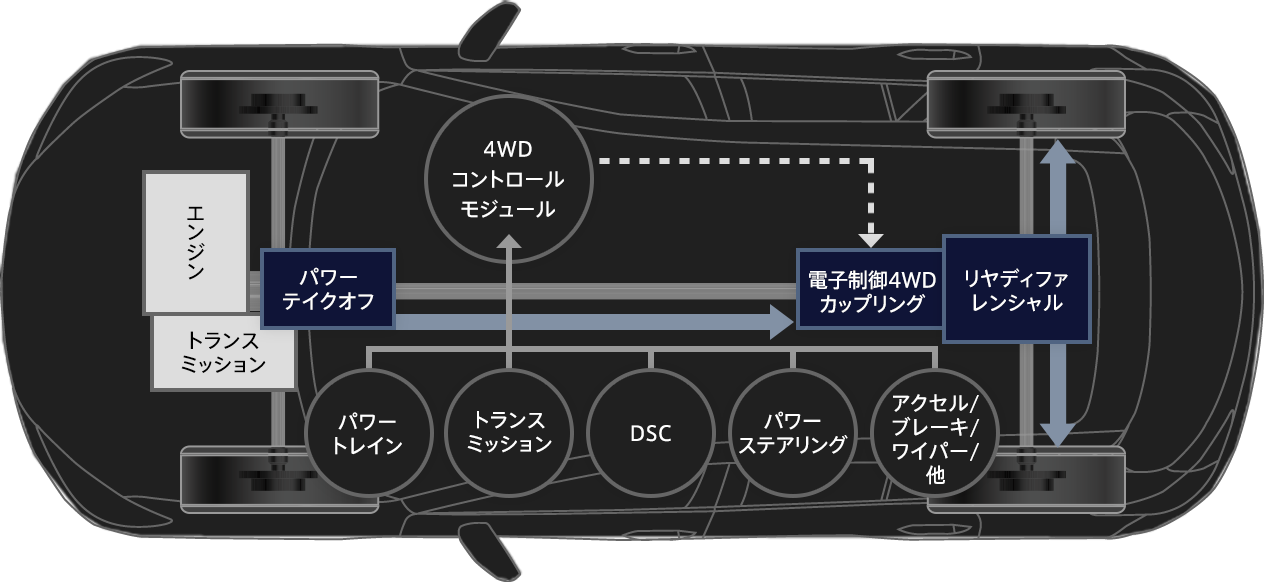
2. 必要な後輪トルクを瞬時に演算・指令
多数のセンサーモジュールによって検知したドライバーの走行意図と路面状況を解析し、前輪のスリップ予兆を打ち消すために必要な後輪トルク量を、4WDコントロールモジュールが瞬時に演算。
ほぼ同時に適切な駆動力を後輪に伝達するよう、4WDカップリングに指令を送ります。
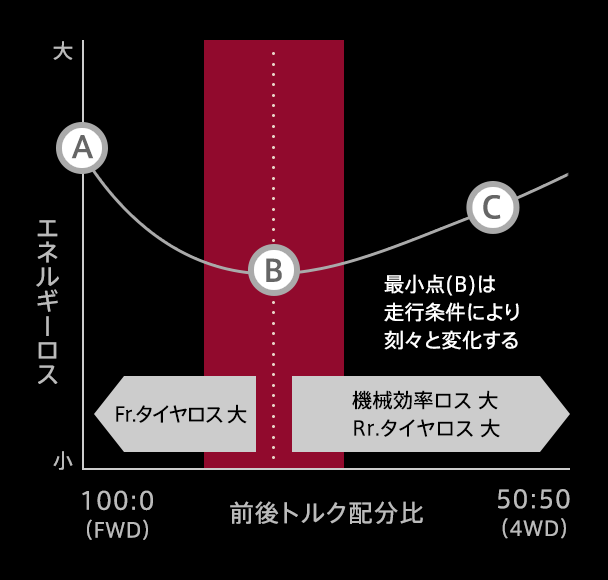
3.安定した走りと優れた低燃費を両立
指令にもとづいた駆動力を後輪に伝達。前後・左右方向に車輪をスリップさせることなく、安定した発進・加速・旋回・制動を実現します。
また、スリップしにくい乾いた路面では、不要な後輪トルクの伝達を抑え、ほぼ2WD状態で走行。優れた燃費に貢献します。
こだわりの先進技術
高精度な駆動力制御を実現する、
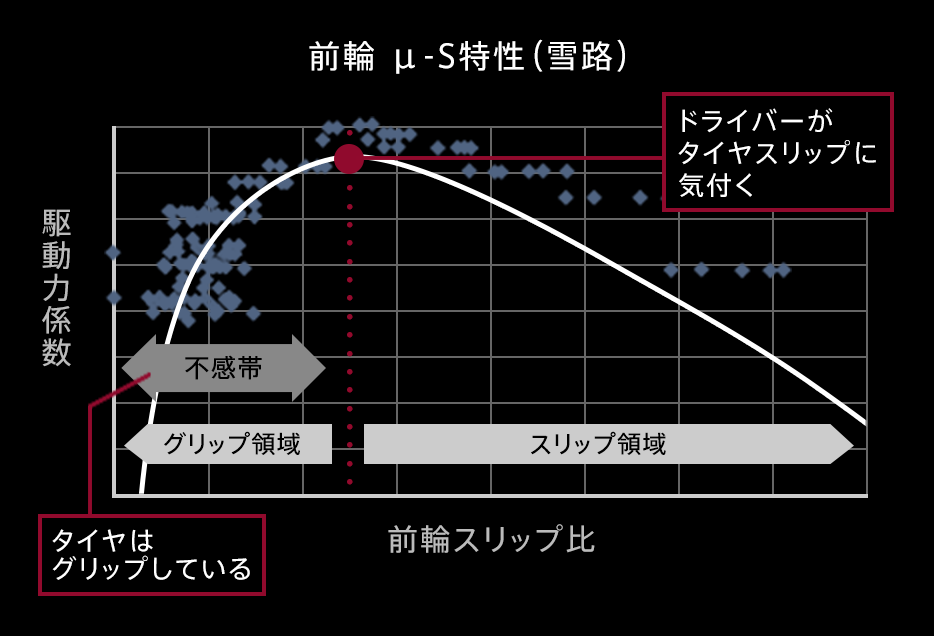
前輪スリップ予兆検知システム。
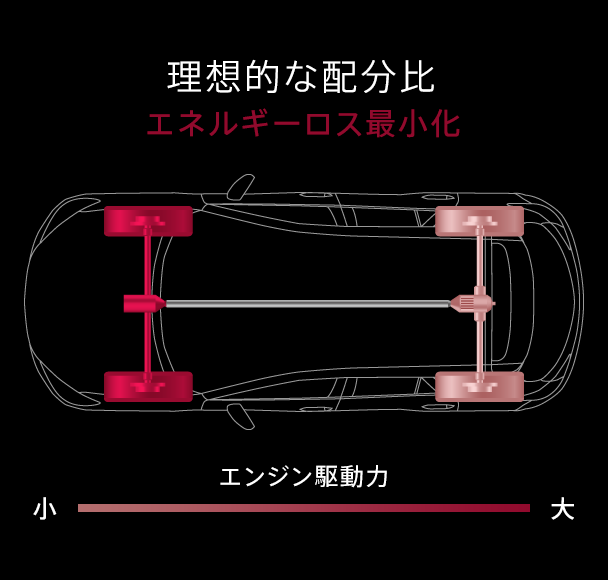
各種センサーにより、車体の対地速度と前輪速度を高精度で検出し、前輪の微小スリップ(空転の予兆)をいち早く察知。
瞬時に適切な駆動力を後輪に配分することで前輪の空転を抑制するとともに、つねに理想的な前後トルク配分による効率のよい4WD走行を実現します。
タイムラグ“ゼロ”のレスポンスを生む、
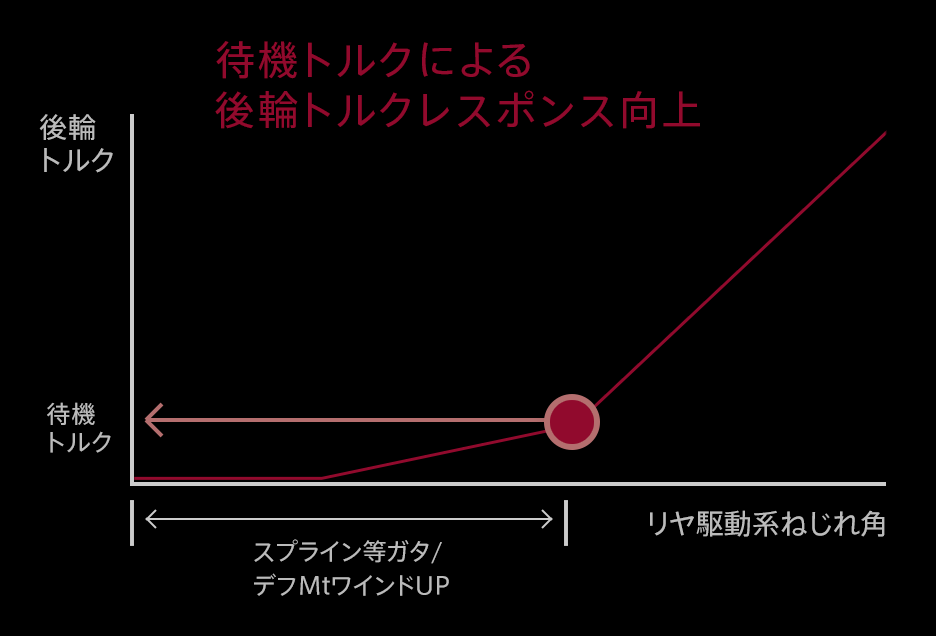
トルク制御システム。
後輪駆動ユニットの反応速度を高めるため、前輪のみの駆動時にも微小なトルクを後輪に伝達させたまま待機。
後輪トルク発生の指令に対して瞬時に反応できる状態を保持し、4WD走行へのスムーズな移行をサポートします。
進化したi-ACTIV AWD
これまで追求してきた「安心・安全」の性能を受け継ぎながら、「意のままの走り」と「実用燃費」がさらに進化。G-ベクタリング コントロール プラス(GVC PLUS*)と協調し、気持ちよいコーナリングを体感できます。更に加減速のシーンでも4輪のタイヤの能力を最大限に引き出すことで、高効率でありながら、安定性の高い走りを実現。雪上だけでなく、塗装路も含めた幅広いシーンで意のままの走りを体感ください。
進化したiACTIV AWD搭載車


オフロード・トラクション・アシスト
悪路を含めた幅広い路面環境での走りをサポートする
オフロード・トラクション・アシスト。
悪路からの脱出が困難な状況においても、オフロード・トラクション・アシストを作動させることで、
AWDとトラクション・コントロール・システム(TCS)が協調してタイヤの空転を抑制。
路面に接地しているタイヤへ適切に駆動力を分配し、トラクション性能を最大限に引き出します。
悪路を含めたさまざまな路面環境においてドライバーの意のままの走りを実現します。
